<<<<Concepts & Design
These pages are mostly is order of the timeline of the build. But during the build I frequently switched between working on different parts of the telescope. Sometimes this was by choice, but usually because this was the logical way of building the telescope.
The prelude
After I was satisfied I had a good 3d model of the telescope, I had some building parts fabricated. All the wooden parts were CNCed out of multilayered plywood birch and several parts were water cut out of aluminium.
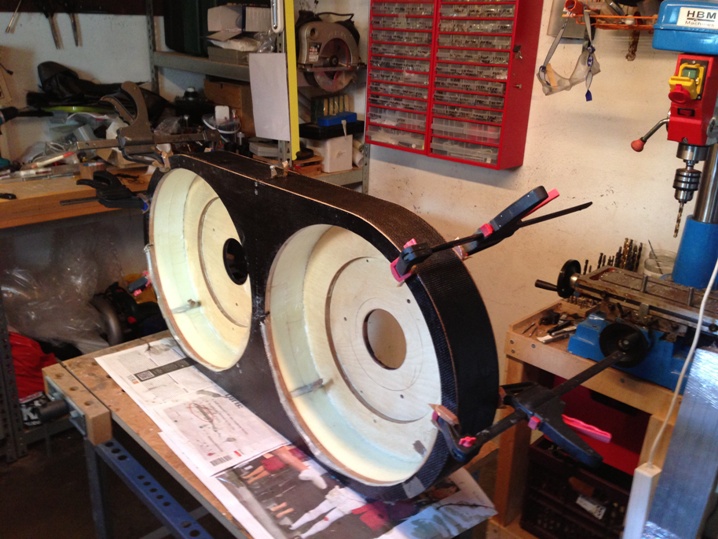
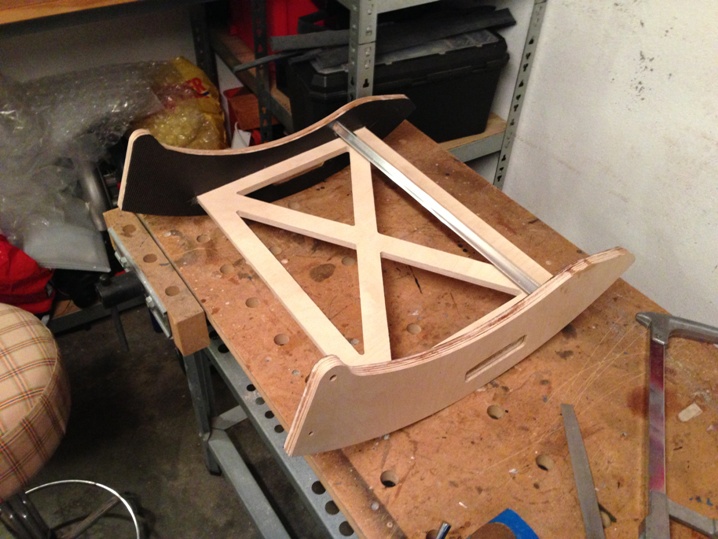
Mirror Box
I started with building the mirror box. The mirror cell configuration was the same as the single mirror telescope I build in 2010. Again a 9 point cell (calculated with Plop) that has a lowered center.




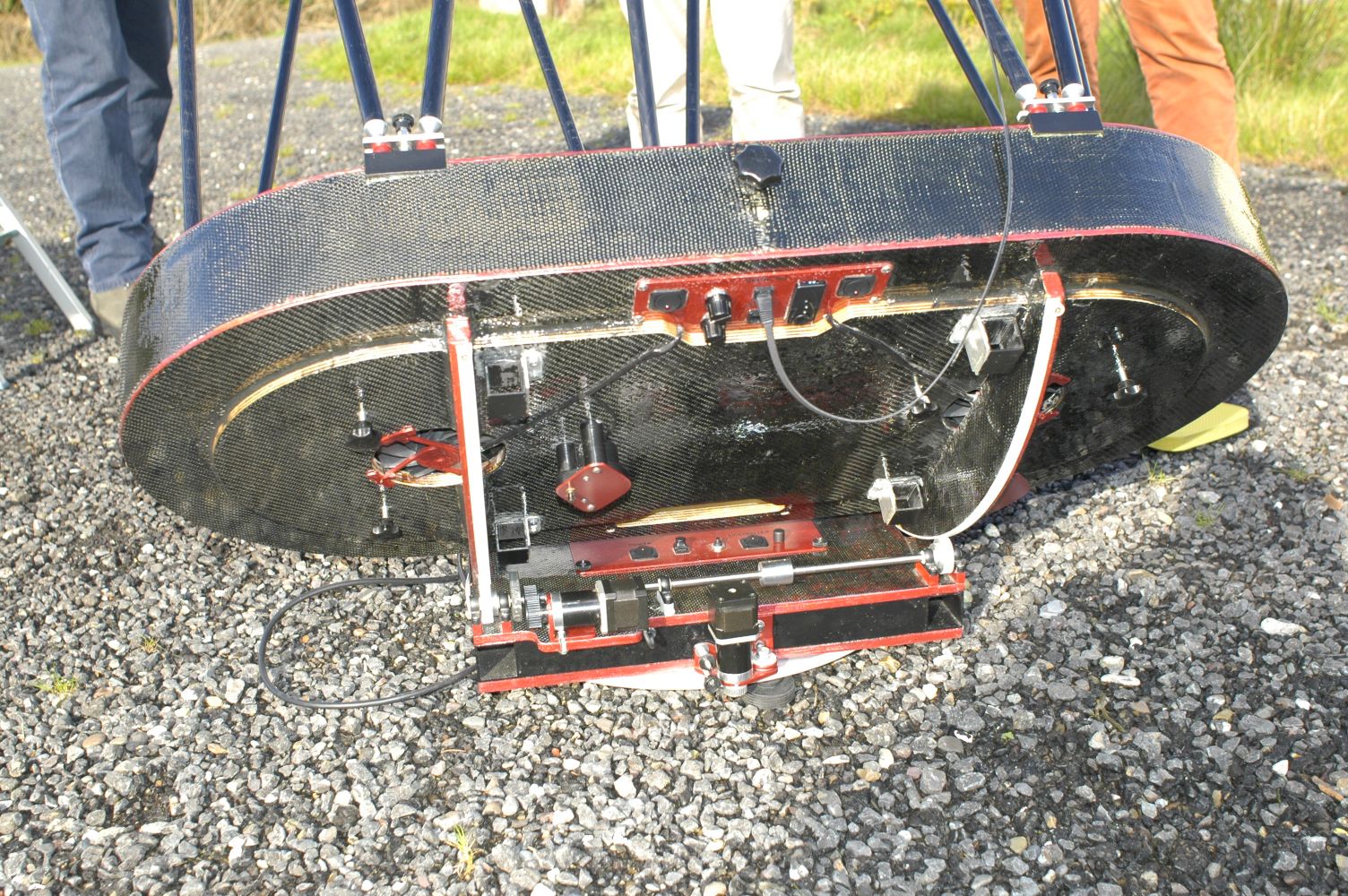
Because it was winter of 2012 when I started building, I needed to do most of the gluing and laminating of the mirror box in my livingroom (my workspace wasn’t heated). Its safe to say not everybody was happy about this. Laminating parts is labor intensive and a messy job, but its the best way to get stiff and lightweight structures. Due to the size of the telescope I wanted the altitude sections to be foldable. In hindsight this was not necessary and made building this part overly complicated. At the time the choice was made because I wasn’t quite certain about how to transport the telescope.







Electronics
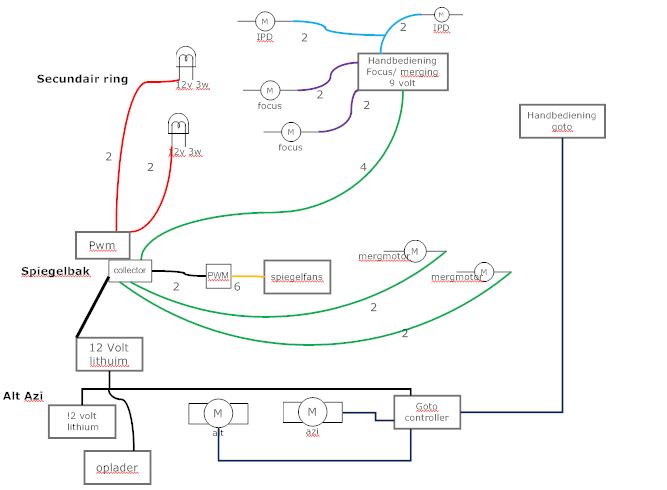
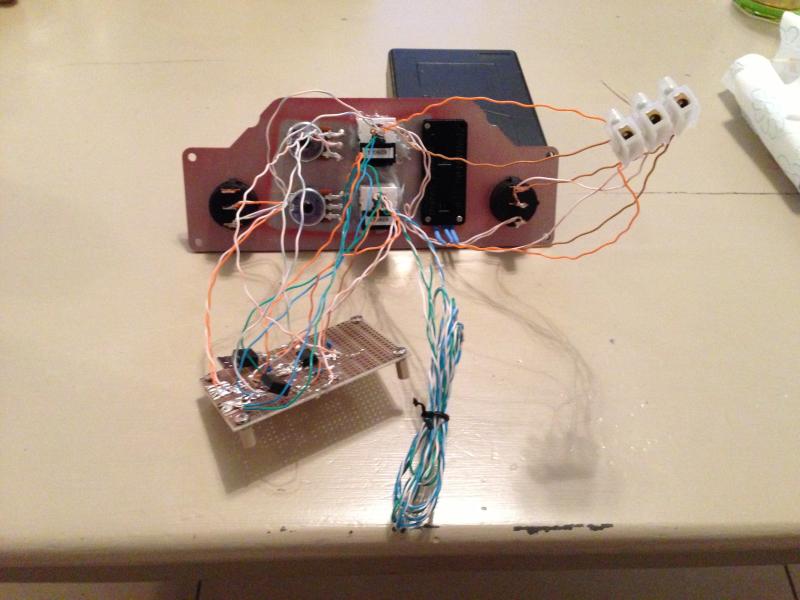
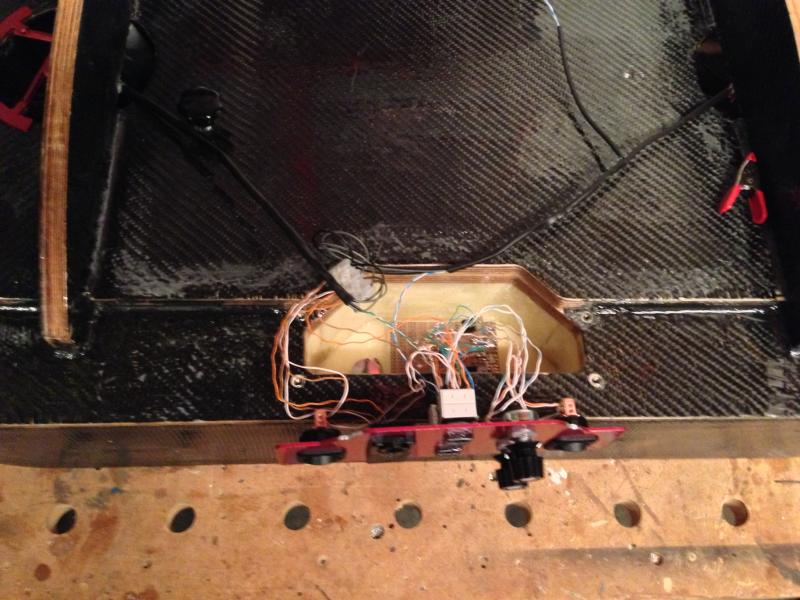
Having learned from previous builds that a lot of wires around a telescope is not a good idea, I wanted to internalize most of the wiring. I needed wiring for mirror fans, secondary mirror heating, motofocus, merge motors, inter pupillary distance motor and the Goto computer. All of this needed to run on a single 12 and a single 5 volt powersource in different locations on the telescope. Since I’m not adapt at working with electronics this was a bit of nightmare to get right.
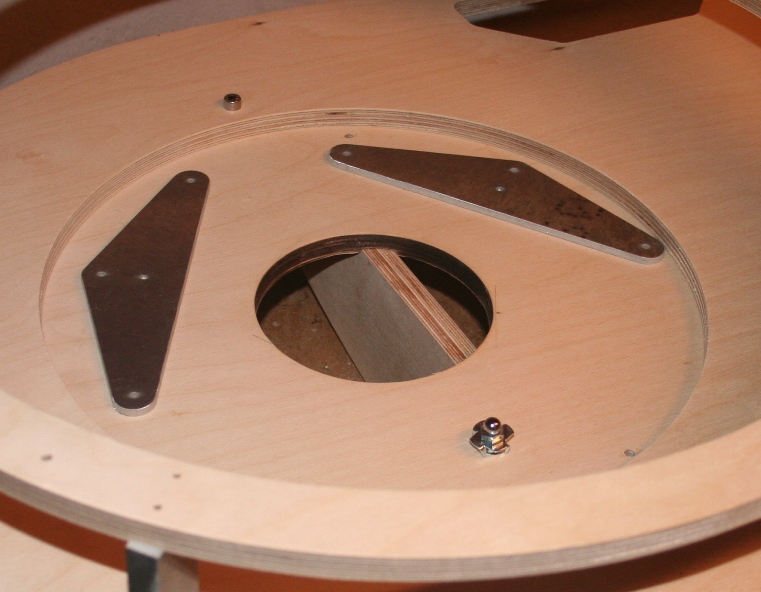
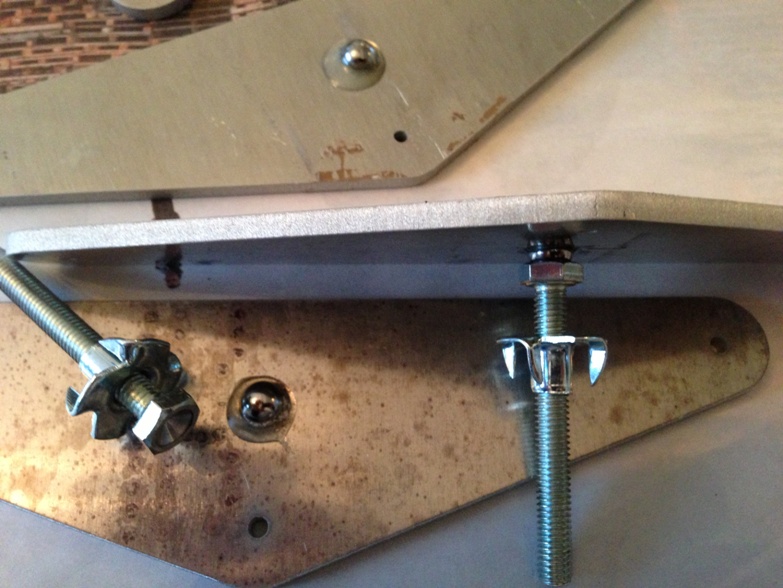
Merging
To merge the images of the two mirrors I use the tilt-method. Both mirrors tilt on a different axis. Mechanically this method is the most simple one for big telescopes. I use two motors on two different collimation knobs, that are controlled with a handterminal.